BaseCam GPS IMU
The GNSS-aided compact AHRS/IMU module from BaseCam Electronics is designed to serve as either the primary or an external IMU sensor for all SimpleBGC32 controllers. Delivering significantly higher precision than built-in or conventional IMU sensors, it enhances stabilization accuracy in demanding environments where standard IMUs often fall short.
This advanced module effectively addresses common basic IMU systems issues, such as:
- Heading drift
- Unstable roll and tilt during acceleration
- Drift due to environmental temperature changes
As a main IMU, the module connects to the gimbal controller via the CAN bus*, supplying real-time gyroscope data and accurate attitude/heading information. It becomes the core input for the main stabilization loop, replacing the conventional IMU sensor.
As an External IMU, it connects through any available UART port or CAN bus* on the controller. It provides high-precision attitude and heading data to calibrate and correct the internal IMU. The sensor can be mounted in various locations - on the stabilized platform, gimbal arms, or the gimbal's frame, to optimize performance of the magnetometer and GNSS receiver, both of which are highly sensitive to their surroundings.
Standalone: Thanks to its flexible Serial API over UART, this module can also be integrated into third-party systems that demand high-accuracy AHRS/IMU functionality. Example applications include: Robotics, Drones and UAVs, Surveying systems, Platform stabilization and more
CAN bus connectivity is available only with controllers in the "Extended" family.
Features of the Basecam GPS IMU
- Integrated
GNSS-antenna for a compact size, with the option of connecting an external GNSS receiver by the UART interface; - Full set of navigation sensors: 3-axis gyroscope, 3-axis accelerometer, 3-axis magnetometer, barometer (altimeter), GNSS receiver (concurrent Galileo, GLONASS, GPS / QZSS);
- Powerful MCU running Kalman filter for sensor fusion at high rates;
- Thermal stabilization to keep stability over a big range of environmental temperatures;
- Full factory calibrations made on special equipment*;
- Interfaces: UART, USB, CAN, I2C
Onboard SD card forhigh-rate data logging with actualdate-time information and flexible set of data to log, including logging of external data provided by the host controller;- Backup rechargeable battery for GNSS hot start and
real-time clock; - Open Serial API protocol allows seamless integration with third-party applications
- Support of external high-grade sensors (fiber-optic gyroscopes)
- The functionality will be constantly improved with the firmware updates;
Cost-effective solution compared to otherGNSS-enabled solutions on the market;
Full factory calibrations are made for the gyroscope and accelerometer. An easy-to-use magnetometer calibration procedure allows to get maximum performance by calibrating the magnetometer sensor after installation, to take into account a magnetic environment (soft- and hard-iron cancellation).
Hardware versions
- GPS IMU 1.2 – IMU / AHRS with integrated GNSS receiver as a single unit
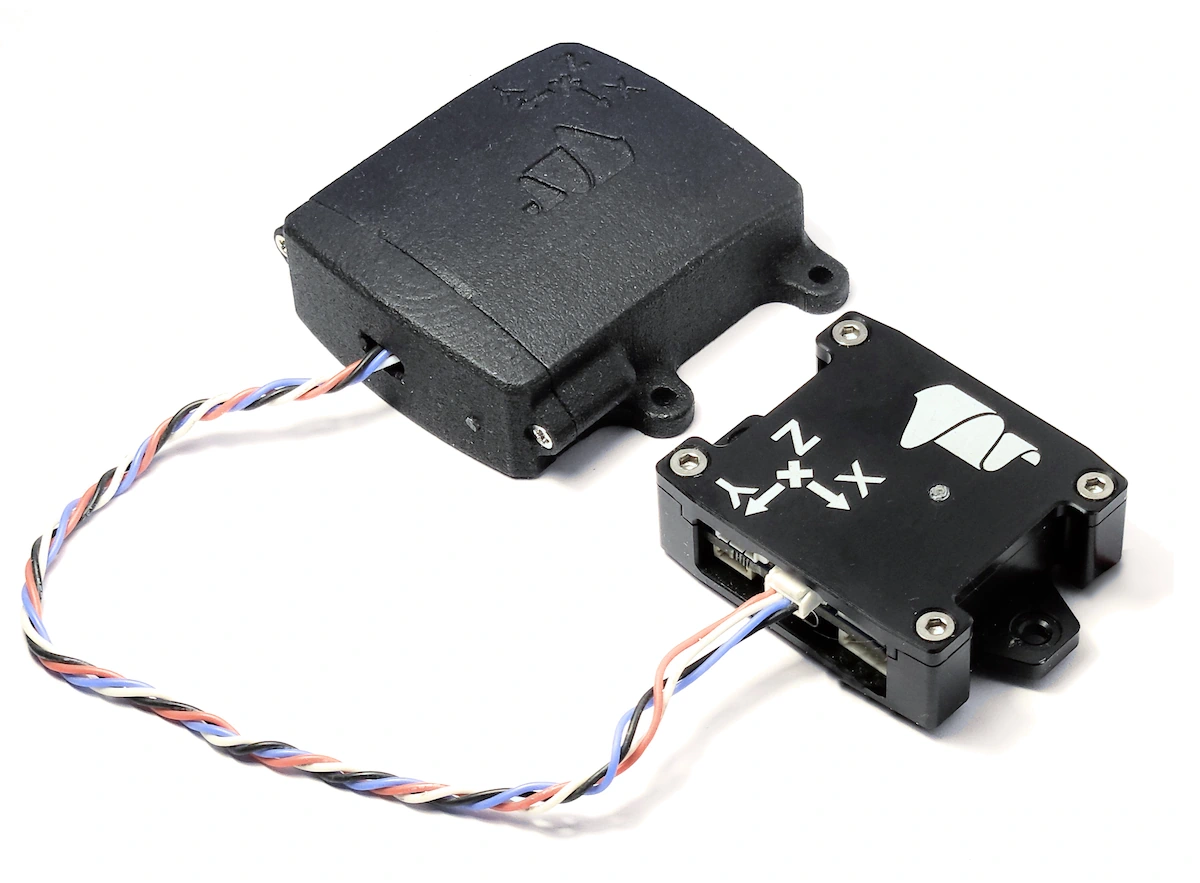
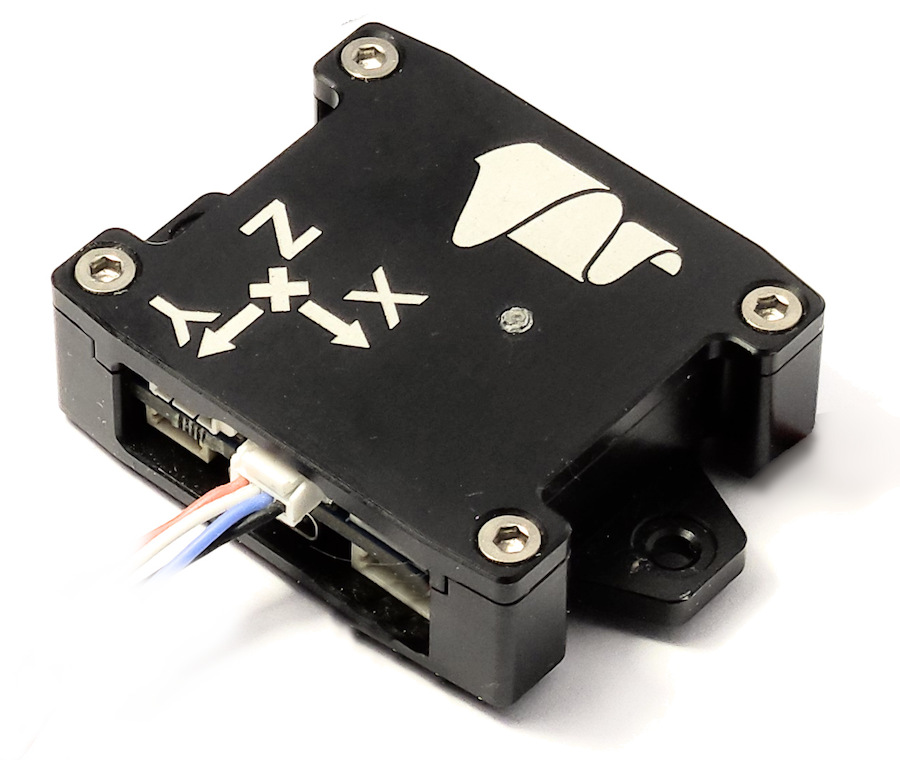
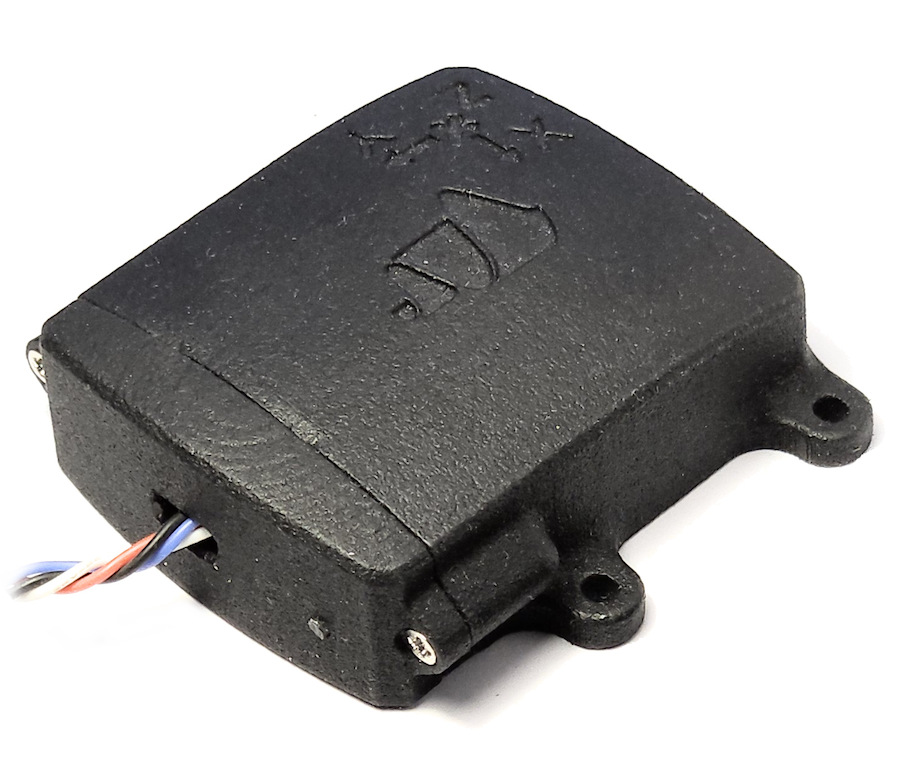
- GPS IMU Split 1.0 – IMU / AHRS as a separate module, connected to the GNSS receiver module using Basecam proprietary CAN protocol
Specifications
| GPS_IMU 1.2 | GPS_IMU Split Sensor 1.0 | GPS_IMU Split Receiver 1.0 | |
 |
 |
 |
|
| Size of the enclosure | 73×51×30 mm | 55×39×14.5 mm | 64×57.5×20 mm |
| Weight: | 50 g | 36 g | 38 g |
| Mounting holes | 3 mm × 4 | 3 mm × 2 | 3 mm × 4 |
| Communications | 2× UART 1× micro USB 1× CAN 1× I2C for external sensors 1× microSD |
2× UART 1× USB Type C 2× CAN 1× I2C for external sensors 1× microSD |
3× UART (2 as connectors, 1 as pads) 1× CAN |
| Power supply | 5V | ||
| Power consumption |
~400 mA to warm up, then ~150 mA (at room temperature) |
||
| Working temperature range | −40…+85 °C |
||
| Startup time |
1 sec. communication ready, 3 sec. first data ready |
||
Downloads
Firmware updates
To get the firmware, you will be asked to provide a device's S/N. Where to find it?
- USING SD CARD: you can find S/N in file "BOARD.INI" on the SD card 1. To access SD card, use a card reader or connect device to PC using USB cable, then hold the "mode" button for 4 seconds to mount it as a USB mass-storage device. Open "BOARD.INI" file in any text editor and copy S/N from the first line.
- USING SimpleBGC32 GUI: when GPS_IMU is connected to the SBGC32 controller by CAN bus (the role is "Main IMU") or UART (the role is "External IMU"), in the latest version GUI, open "Show status.." dialog and copy the device S/N to the clipboard 1.
- Using a Product S/N instead - you can find it on the sticker.
After the firmware is downloaded and saved to a temporary file, there are two ways to upload it to the device
- USING SD CARD: copy the downloaded file 'FWUPDATE.BIN' into the root directory of the SD card, connected as described above. When the file is copied, restart the device (re-connect power source or USB). LED will blink green several seconds during the firmware update, then device starts in a normal mode.
- USING SimpleBGC32 GUI: For UART connection, firmware update is available via "External IMU" tab - "Show status.." dialog - "FIRMWARE UPDATE…" button. For CAN connection, it's available via "Firmware upgrade" tab - "Connected modules". An update takes 2-3 minutes; do not break the connection during this process!
More details you can find in the Reference Manual.
Firmware for GPS_IMU 1.x and GPS_IMU Split.Sensor
Firmware for GPS_IMU Split.Receiver
CAN Serial Hub / GPS_IMU Split.Receiver firmware v.1.04 (34Kb 15.07.2025)- Bugfix: a small number of GNSS data packets might be missed
How to upgrade firmware in CAN modules
Connect the module by CAN interface to the board, connect the board to a PC, and run SimpleBGC32 GUI. It's better not connect a battery (except for the CAN_DRV module, which doesn't take power from the CAN bus).
- Go to "Upgrade" tab, open "Connected modules" tab. Press the "Refresh" button to reload module information.
- Select a required module from the list. GUI will show the current hardware, firmware, and bootloader versions for each module (except for GUI prior to 2.62, which shows only hardware and bootloader versions).
- Browse for the file containing new firmware. Be careful, flashing an improper file will make the device "bricked" and it will be hard to make it alive.
- Press the "Flash" button to write firmware.
- Restart the main controller to let it see the changes.
- Connect GUI and repeat steps 2 and 3 to check that the new firmware is working and the whole system operates normally.
Support
Type your question or comment below. Answer will be sent at your E-mail within 24 hours on workdays.